
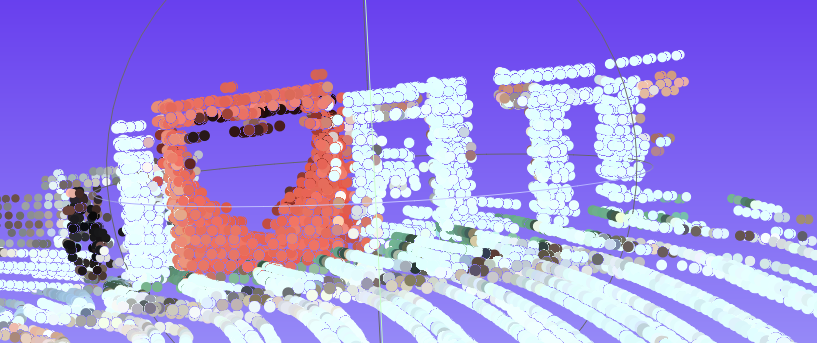
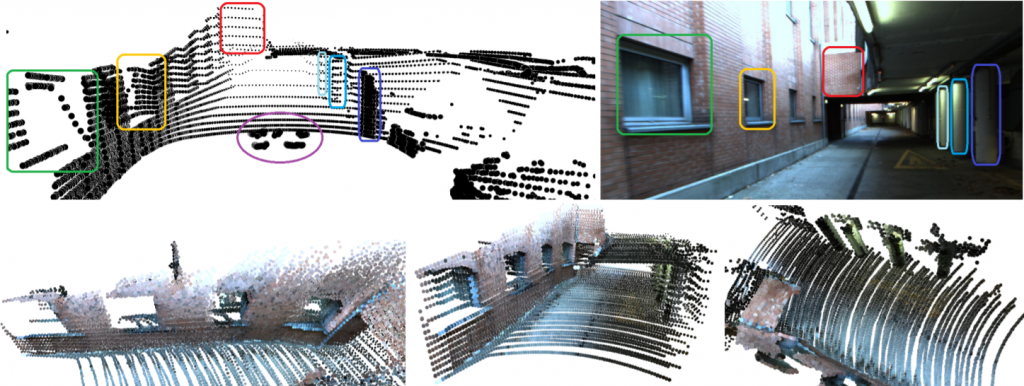
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
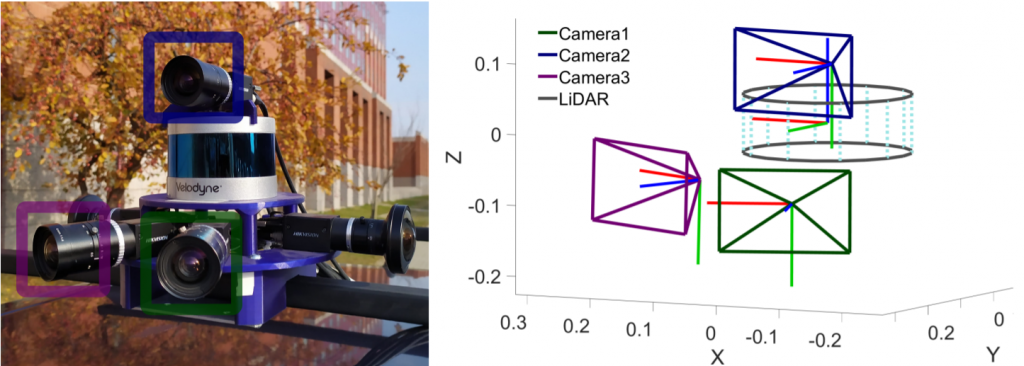
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Our colleagues have published a paper at GRAFGEO2024 which overviews how ELTECar can be applied to save traffic situations recorded by different vehicle-mounted sensors. A client-server approach for MS
We are pleased to announce the launch of our latest research initiative focusing on automated horizon line detection. Accurate horizon estimation is a fundamental challenge in computer vision, playing a
Alighanem mindenki látott már sofőr nélkül közlekedő, önvezető járműveket tudományos-fantasztikus filmekben. Szakértők még 15-20 éve is úgy gondolták, hogy az ilyen közlekedési eszközök mára mindennaposak lesznek. Bár az autógyártók egyre