
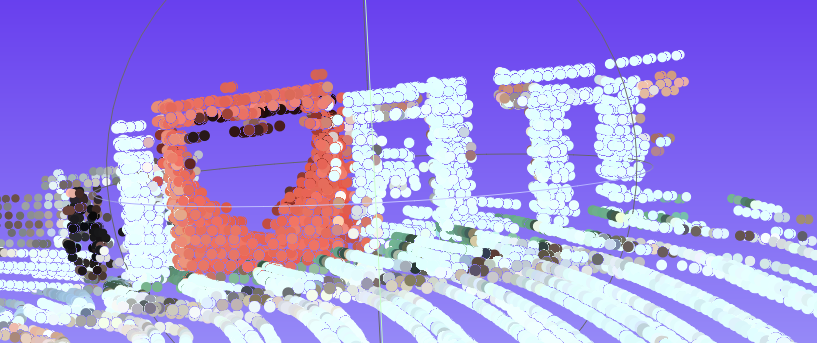
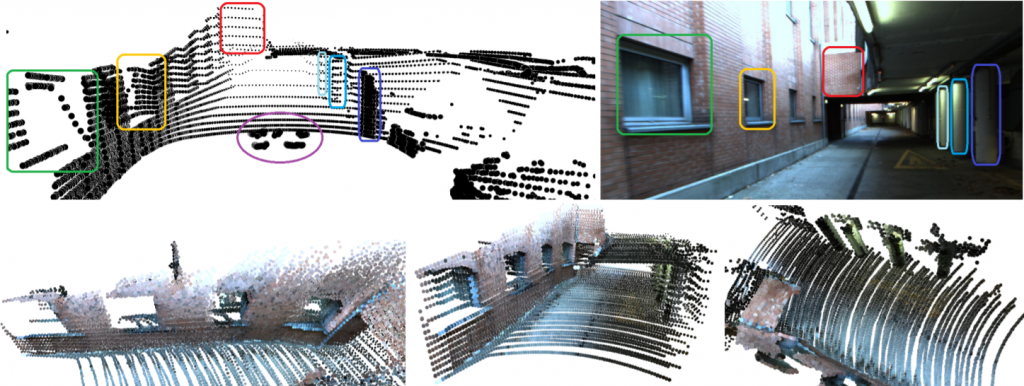
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
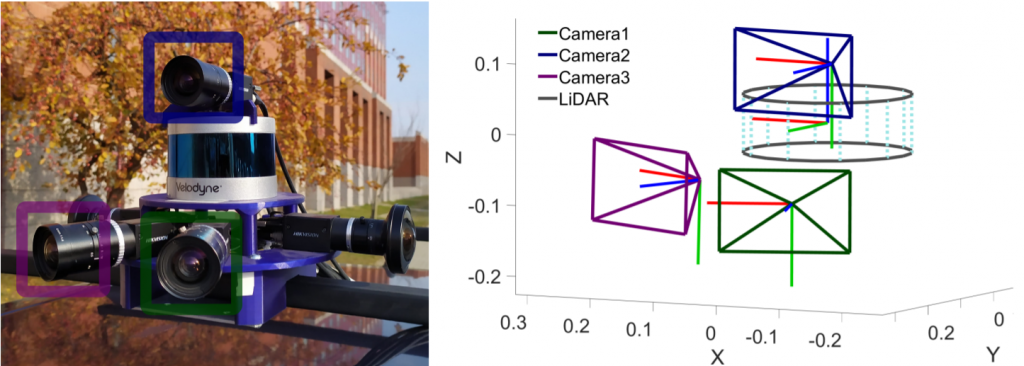
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Our colleagues have published a paper at GRAFGEO2024 which overviews how ELTECar can be applied to save traffic situations recorded by different vehicle-mounted sensors. A client-server approach for MS
Congratulations to Tarlan Ahadli, PhD student of our research group, to who was awarded the ‘Best Talk of the Image Processing’ price at the Conference of PhD Students in Computer
Tamás Tófalvi, PhD student of our research group presented the work entitled ‘Calibration of 2D LiDAR sensors using cylindrical target’, written by Tófalvi Tamás, Bandó Kovács, and Levente Hajder. Abstract: