
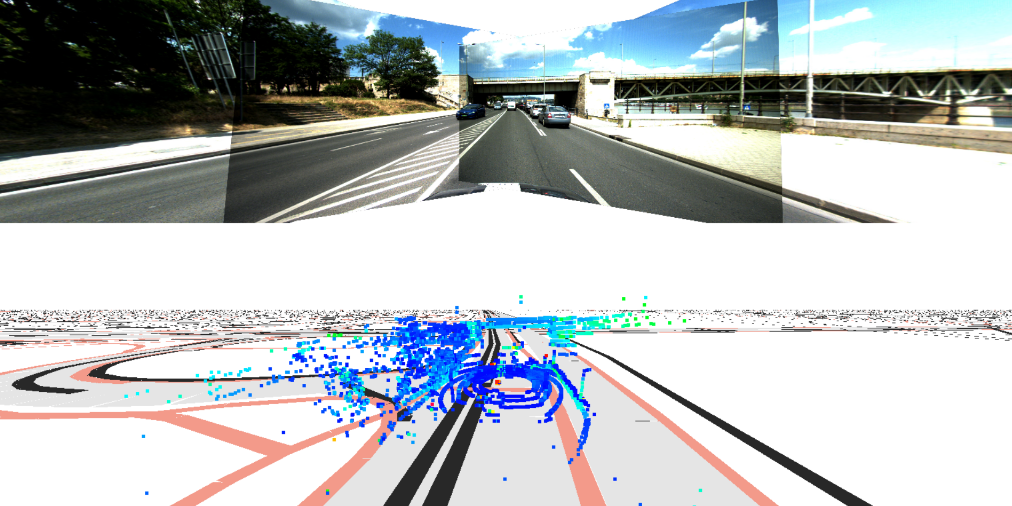
Our colleagues have published a paper at GRAFGEO2024 which overviews how ELTECar can be applied to save traffic situations recorded by different vehicle-mounted sensors.
A client-server approach for MS Windows has been developed. You can download the client and server if you click on the links.
Server:
Example client:
Data can be found using the links at https://www.hackademix.hu/timeline-of-the-contest/. The server can load these files.