
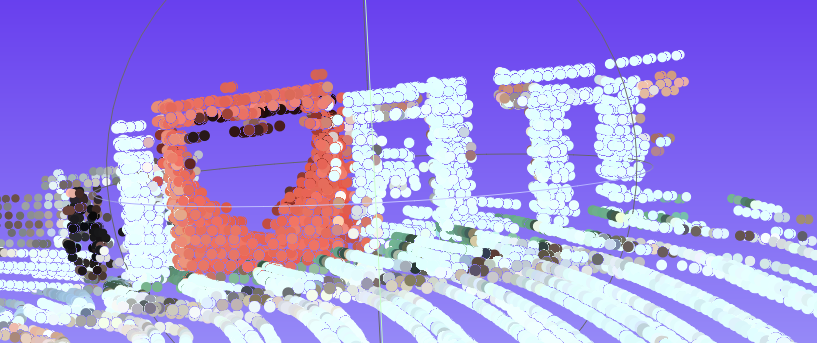
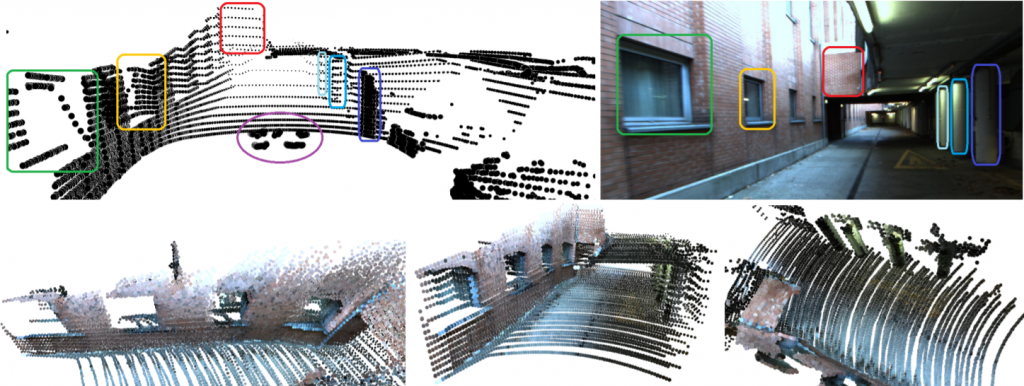
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
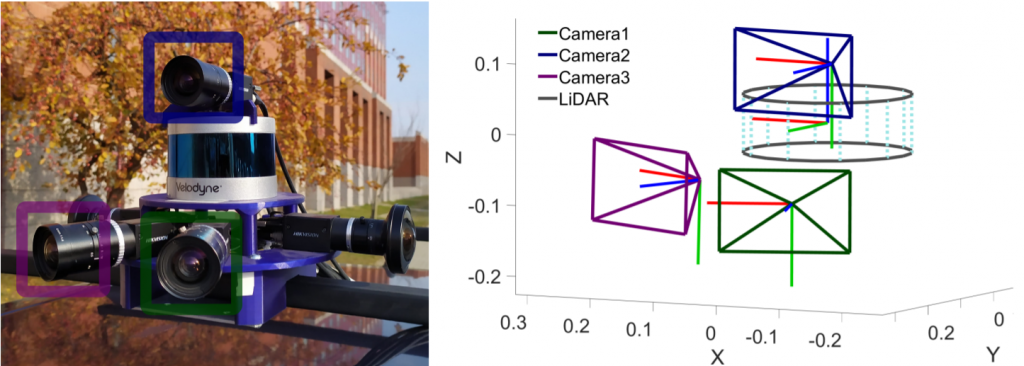
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Autóra szerelt kamerák lépeiből, és LiDAR adatokból rekonstruált jelenetek.
LiDAR és kamerák helyzete egymáshoz képest:
A készülő cikk kézirata: IJCV manualscript
Congratulations to Tarlan Ahadli, PhD student of our research group, to who was awarded the ‘Best Talk of the Image Processing’ price at the Conference of PhD Students in Computer
We are pleased to announce the launch of our latest research initiative focusing on automated horizon line detection. Accurate horizon estimation is a fundamental challenge in computer vision, playing a
The result of the first Bosch-ELTE competition is as follows: 1) Barbara Szabó 2) Dávid Fischer 3) Bence Csabai Congratulations for the students. The original proposal can be read here: